|
Fan Shi 石 凡
I am an Assistant Professor and director of Human-Centered Robotic Lab, Electrical and Computer Engineering, National University of Singapore, awarded by Presidential Young Professorship.
I was a Postdoctoral Fellow at ETH AI Center working with Prof. Stelian Coros and Prof. Marco Hutter.
I obtained the PhD degree at JSK Lab, the University of Tokyo, supervised by Prof. Masayuki Inaba and Prof. Kei Okada from 2016 to 2021.
In 2020, I was visiting RSL Lab, ETH Zurich supervised by Prof. Macro Hutter.
I did my Bachelor in Peking University advised by Prof. Huijing Zhao.
I was visiting in Microsoft Research Asia (by Prof. Katsushi Ikeuchi) and Takanishi Lab (by Prof. Atsuo Takanishi) during my undergraduate.
In spare time, I was fortunate to work with Erico Guizzo and Evan Ackerman as a Contributor on IEEE Spectrum Robotics, and my great friend Yifan Hou on 机器人学家. My lifelong target is to build the good stuff, and help the good happen.
CV /
Google Scholar /
LinkedIn /
Twitter
fan.shi[at]nus.edu.sg
|

|
|
News: 2025.01 - We are pleased to announce the launch of our new lab website. Future news, events, and updates will be posted there: https://nus-hcrl.github.io
News: 2025.01 - Honoured to serve as the Associate Editor in RA-L and IROS 2025.
News: 2025.01 - 2 paper accepted in ICRA 2025, 1 paper accepted in RoboSoft, 1 paper accepted in SSRR. Congratulations to all the collaborators.
News: 2024.11 - Honoured to be a keynote speaker at Automous Robotic Technology Seminar, see you in Shenzhen.
News: 2024.11 - Honoured to give an invited talk at Technical University of Munich Garching on robustness assessment.
News: 2024.10 - Check our new paper using differentiable simulator to learn end-to-end perceptive loco-navigation policy!
News: 2024.06 - Honoured to give an invited talk at Stanford University on AI safety.
News: 2024.06 - Our RSS 2024 paper is featured in IEEE Spectrum!
News: 2024.06 - Honoured to give an invited talk at Google DeepMind Robotics team on AI safety.
News: 2024.05 - One paper is accepted in RSS 2024, see you in Delft!
News: 2024.04 - Honoured and humbled that I will join National University of Singapore as an Assistant Professor this summer. Thanks very much for all your support!
News: 2024.03 - Honoured to give an invited talk in Peking Univ. and Tsinghua Univ., long time no see in Beijing!
News: 2024.01 - HumanMimic is accepted to ICRA 2024. Congratualtions, Annan!
News: 2023.12 - Honored that our proposal was selected as the best draft finalist in AI Safety Prize!
News: 2023.06 - Honored to be an invited speaker in IROS 2023 workshop of Reactive and Predictive Humanoid Whole-body Control. Thanks for the organizer and see you in IROS!
News: 2023.05 - I am going to ICRA 2023, see you in London!
News: 2022.11 - I move to ETH Zürich as apostdoctoral fellow on quadrupedal robots. Welcome to visit me when you are in Zürich!
News: 2022.07 - Papers are accepted in IROS 2022 and ISRR 2022. We appreciate all the valuable comments from the asynchronous reviewers.
News: 2022.03 - I am humbled and thrilled that my PhD thesis gets the best dissertation award in my department.
News: 2021.09 - I resigned as the Contributor for IEEE Spectrum Robotics. It's a great journey for me towards "help the good happen", thank you Evan and Erico for having me since 2018!
News: 2021.09 - I defended my PhD!!! I'm very happy :))) but exhausted. :(
News: 2021.03 - Our work on aerial interception is accepted Field Robotics!
News: 2021.02 - Our work on ANYmal dexterity is accepted in ICRA 2021!
News: 2020.11 - New ANYmal video during my exchange in RSL Lab, ETH comes out! We achieve the dexterous manipulation on the real quadrupedal robot, and submit it to ICRA 2021.
News: 2020.09 -Finish the visit in RSL Lab, ETH. Great journey with amazingly robust ANYmal robot. Thank you all the friends in Zurich, you guys are amazing!
News: 2020.06 -Honored to receive IEEE RAS-JJC Young Award in ICRA 2020. Thank you RAS Japan!
News: 2020.03 -Excited to start my visit in RSL Lab, ETH. Looking forwards to meeting friends in Zurich!
News: 2020.02 -We got 3rd prize on MBZIRC Challenge 2020 Challenge 1!
News: 2019.12 -Paper on aerial regrasping is accepted by ICRA 2020. See you in Paris!
News: 2019.11 -IEEE Spectrum Video Friday featured our IROS work on fast transformation and aerial tennis! Thank you Evan and Erico!
News: 2019.11 -Thrilled to be awarded with a grant from NCCR for visiting RSL Lab, ETH. Many thanks to NCCR and Prof. Hutter! Looking forwards to making friends and playing with ANYmal robot next year!
|
|
First author:
|

|
Rethinking Robustness Assessment: Adversarial Attacks on Learning-based Quadrupedal Locomotion Controllers
Fan Shi *,
Chong Zhang *,
Takahiro Miki,
Joonho Lee,
Marco Hutter,
Stelian Coros
RSS 2024 (Featured in IEEE Spectrum)
Video,
Paper
Computationally investigate the vulnerabilities in black-box learning-based controllers towards AI safety, better evaluation method, and more robust performance.
|

|
Reference-free Learning Bipedal Motor Skills via Assistive Force Curricula
Fan Shi,
Yuta Kojio,
Tasuku Makabe,
Tomoki Anzai,
Kunio Kojima,
Kei Okada,
Masayuki Inaba,
ISRR 2022 (Featured in IEEE Spectrum)
Video,
paper
First time to achieve several challenging humanoid skills without joints motion reference.
|
|
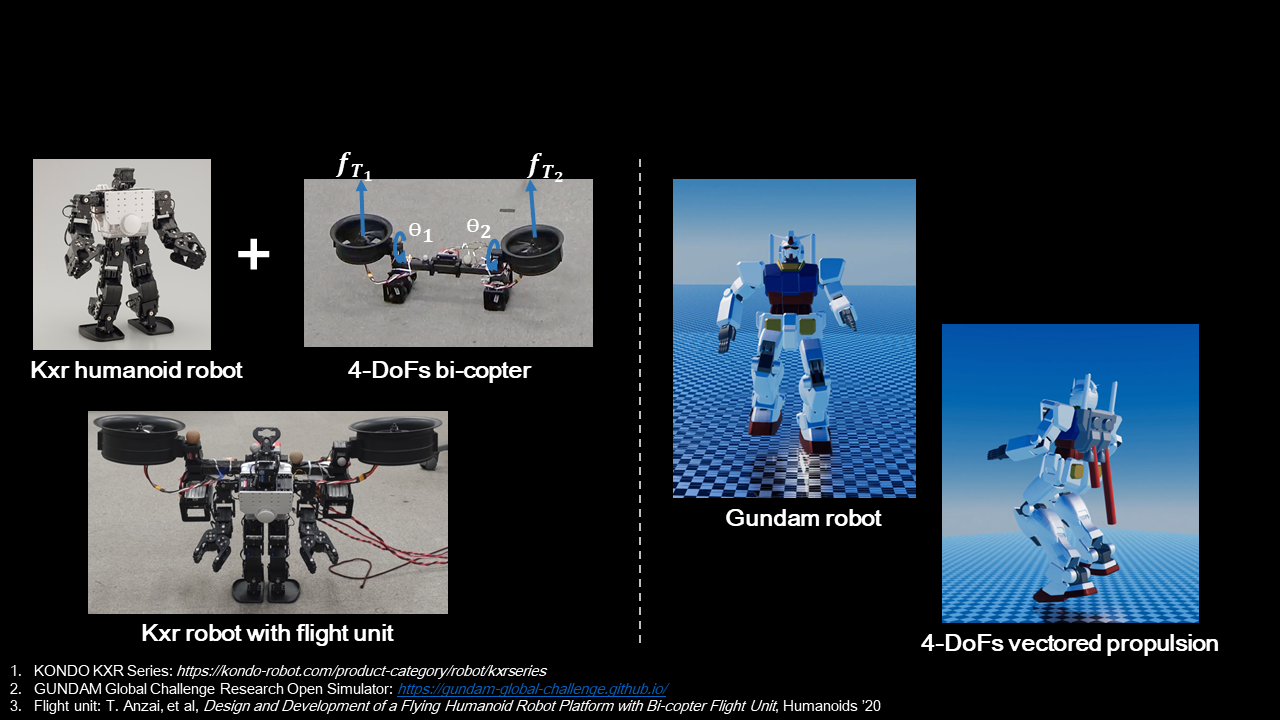
Learning Agile Hybrid Whole-body Motor Skills for Thruster-Aided Humanoid Robots
Fan Shi,
Tomoki Anzai,
Yuta Kojio,
Kei Okada,
Masayuki Inaba,
IROS 2022 (Featured in IEEE Spectrum)
Video,
paper
First time to achieve dynamic hybrid locomotion on aerial humanoid robots.
|

|
Circus ANYmal: A Quadruped Learning Dexterous Manipulation with its Limbs
Fan Shi,
Timon Homberger,
Joonho Lee,
Takahiro Miki,
Moju Zhao,
Farbod Farshidian,
Kei Okada,
Masayuki Inaba,
Marco Hutter,
ICRA 2021
Video,
Paper
First time to achieve dynamic dexterous manipulation on a real quadrupedal robot.
|
|
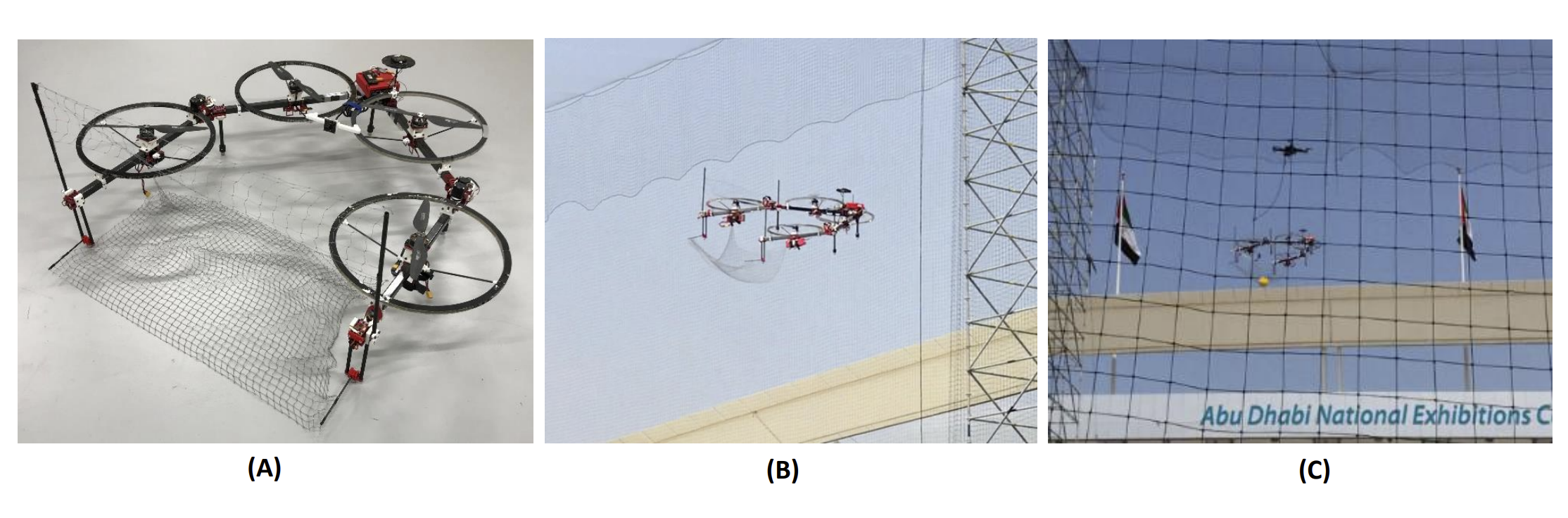
Team JSK at MBZIRC 2020: Interception with Fast Flying Target Using a Multilinked Aerial Robot
Moju Zhao*,
Fan Shi*,
Tomoki Anzai,
Takuzumi Nishio,
Toshiya Maki,
Keita Ito,
Naoki Kuromiya,
Kei Okada,
Masayuki Inaba,
Field Robotics 2021 (3rd prize in challenge)
Video,
paper
Novel and robust approach for MBZRIC Challenge Task1 as the 3rd prize team.
|
|
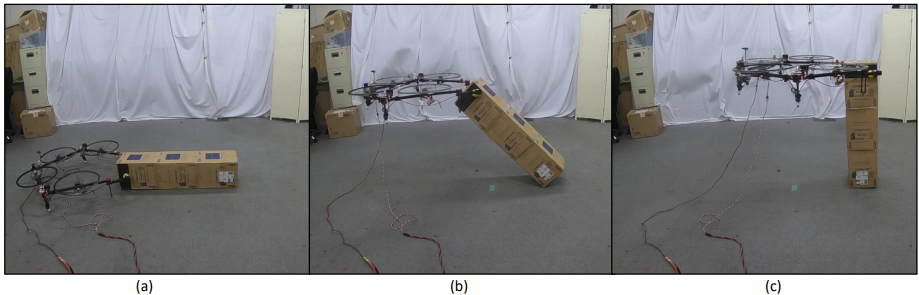
Aerial Regrasping: Dynamic Pivoting with Transformable Multilink Aerial Robot
Fan Shi,
Moju Zhao,
Masaki Murooka,
Kei Okada,
Masayuki Inaba,
ICRA 2020 (IEEE RAS-JJC Young Award in ICRA 2020)
Video,
paper
First time to achieve aerial regrasping with contact-aware planning framework in our best knowledge.
|
|
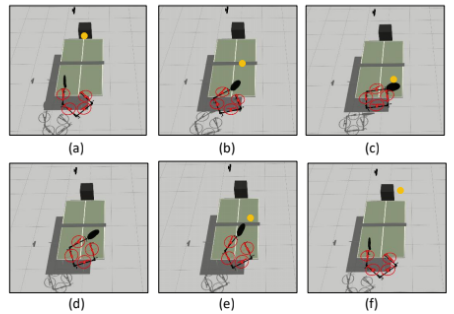
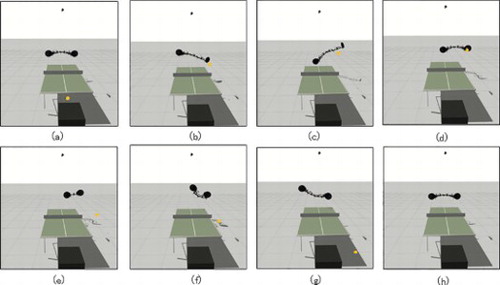
Exploring Online Agile Manipulation Task for Aerial Transformable Multilink Robot
Fan Shi,
Moju Zhao,
Tomoki Anzai,
Keito Ito,
Xiangyu Chen,
Kei Okada,
Masayuki Inaba,
IROS 2019 (Featured in IEEE Spectrum)
Video,
paper
Improving the motion primitive with the consideration of infeasible configuration based on previous research, and table tennis task of single-racket case is achieved.
|
|
External Wrench Estimation for Multilink Aerial Robot by Center of Mass Estimator Based on Distributed IMU System
Fan Shi,
Moju Zhao,
Tomoki Anzai,
Xiangyu Chen,
Kei Okada,
Masayuki Inaba,
ICRA 2019
Video,
Paper
Using distributed IMU system to estimate external wrench and achieving contact-aided navigation with the help of transformable ability.
|
|
Aerial Regrasping: Exploring Active Dynamic Regrasps with Transformable Multilink Drone
Fan Shi,
Moju Zhao,
Weiwei Wan,
Kei Okada,
Masayuki Inaba,
ICRA 2019 workshop: Toward Online Optimal Control of Dynamic Robots
Video
First time to consider regrasp in aerial robot and achieve dynamic active regrasp by throw-and-recatch.
|
|
Multi-rigid-body Dynamics and Online Model Predictive Control for Transformable Multi-links Aerial Robot
Fan Shi,
Moju Zhao,
Tomoki Anzai,
Keito Ito,
Xiangyu Chen,
Kei Okada,
Masayuki Inaba,
Journal of Advanced Robotics 2018 (Invited submission)
Paper
Online dynamic motion of aerial transformable robot and demonstrating with agile table tennis task of double-racket case.
|
|
Co-authored:
|
|
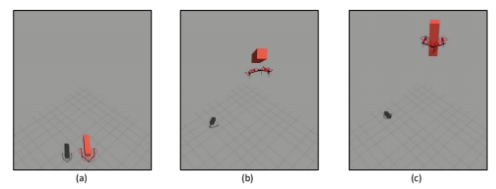
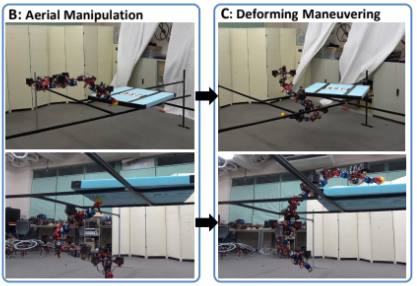
Online Motion Planning for Deforming Maneuvering and Manipulation by Multilinked Aerial Robot based on Differential Kinematics
Moju Zhao,
Fan Shi,
Tomoki Anzai,
Kei Okada,
Masayuki Inaba,
RAL-ICRA 2020
Video, Paper
Dexterous pushing skill by DRAGON robot.
|
|
Model Reference Adaptive Control of Multirotor for Missions with Dynamic Change of Payloads During Flight
Toshiya Maki,
Moju Zhao,
Fan Shi,
Kei Okada,
Masayuki Inaba,
ICRA 2020
Video, Paper
Adaptive controller in aerial transformable robot.
|
|
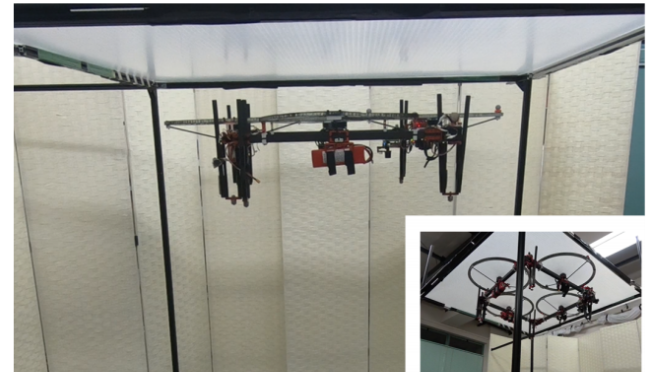
Stable Control in Climbing and Descending Flight under Upper Walls using Ceiling Effect Model based on Aerodynamics
Takuzumi Nishio,
Moju Zhao,
Fan Shi,
Tomoki Anzai,
Kento Kawaharazuka,
Kei Okada,
Masayuki Inaba,
ICRA 2020
Video, Paper
Ceiling effect of aeiral transformable robot.
|
|
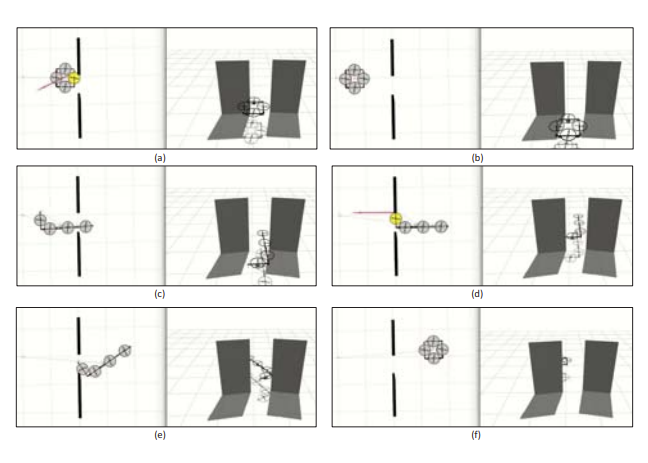
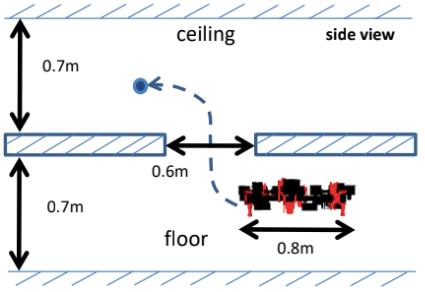
Flight Motion of Passing Through Small Opening by DRAGON: Transformable Multilinked Aerial Robot
Moju Zhao,
Fan Shi,
Tomoki Anzai,
Xiangyu Chen,
Kei Okada,
Masayuki Inaba,
IROS 2018 (Featured in IEEE Spectrum)
Video,
Paper
DRAGON robot traverses through a narrow gap with sampling-based planner.
|
|
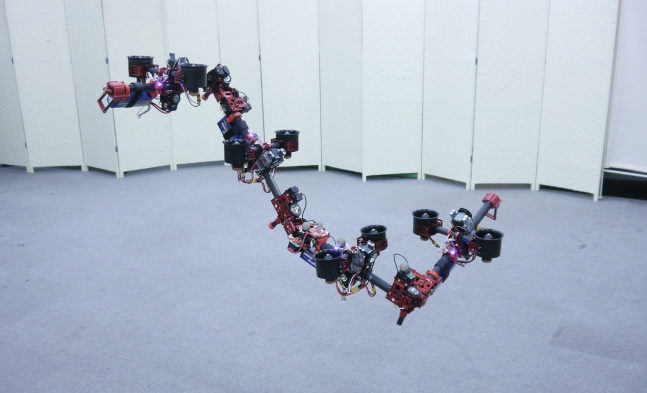
Design, modeling, and control of an aerial robot dragon: A dual-rotor-embedded multilink robot with the ability of multi-degree-of-freedom aerial transformation
Moju Zhao,
Tomoki Anzai,
Fan Shi,
Xiangyu Chen,
Kei Okada,
Masayuki Inaba,
RAL-ICRA 2018 (Best paper award on UAV in ICRA 2018)
Video,
Paper
Hardware design and control of DRAGON robot..
|
|
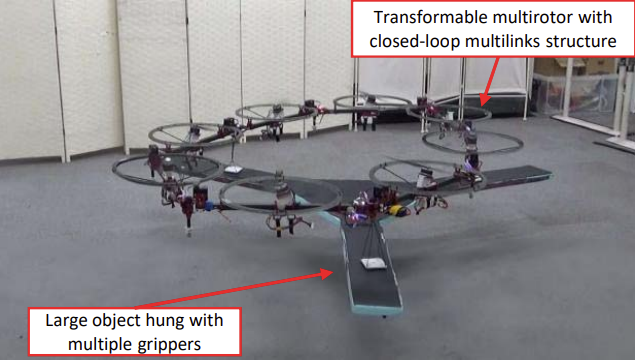
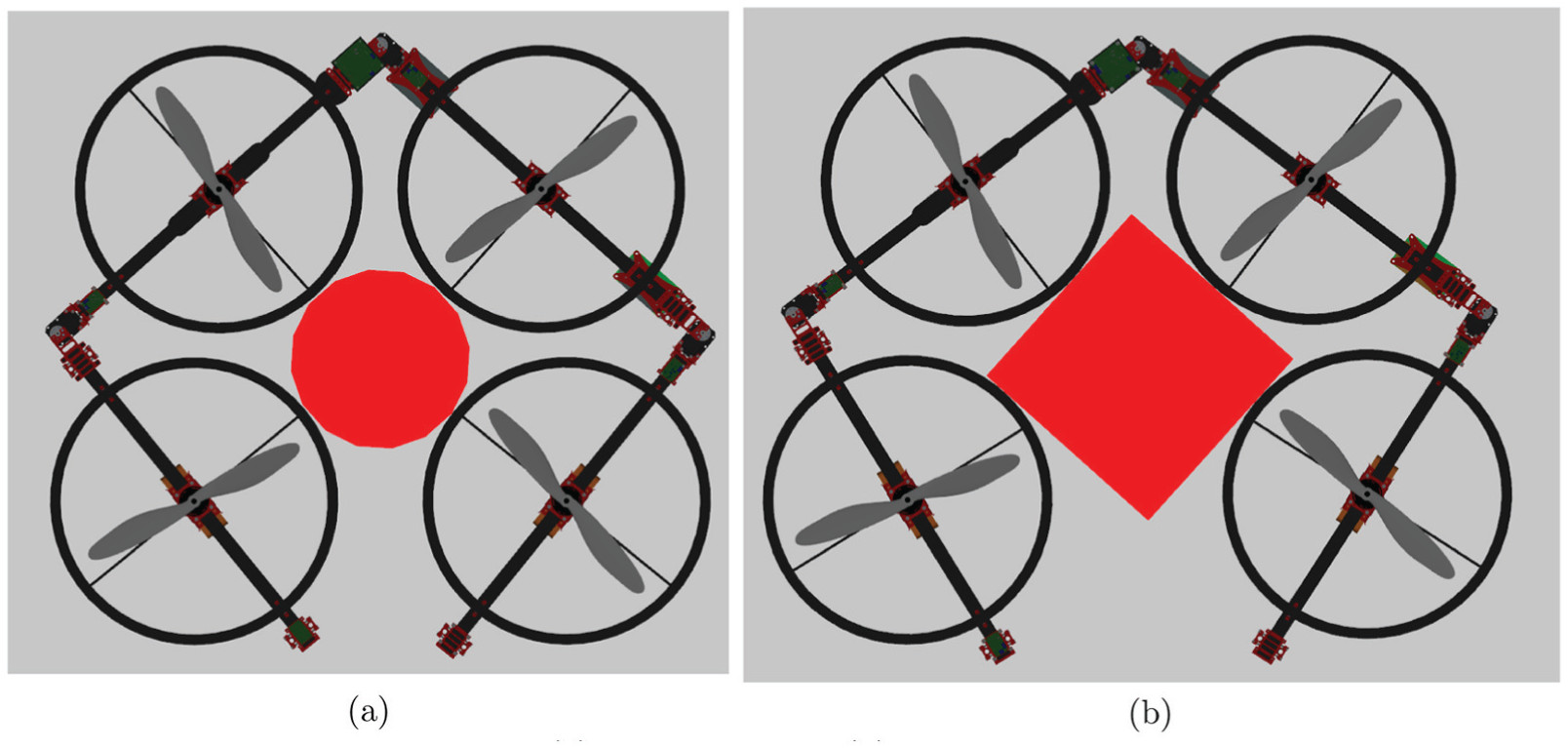
Aerial Grasping Based on Shape Adaptive Transformation by HALO: Horizontal Plane Transformable Aerial Robot with Closed-Loop Multilinks Structure
Tomoki Anzai,
Moju Zhao,
Shunichi Nozawa,
Fan Shi,
Kei Okada,
Masayuki Inaba,
ICRA 2018
Paper
8-links aerial transformable robot grasps large heavy object with optimized transformation.
|
|
Path Planning Based on Differential Kinematics for Passing through Small Opening by Transformable Multilinked Aerial Robot
Moju Zhao,
Tomoki Anzai,
Fan Shi,
Kei Okada,
Masayuki Inaba,
ISER 2018
|
|
Transformable multirotor with two-dimensional multilinks: Modeling, control, and whole-body aerial manipulation
Moju Zhao,
Koji Kawasaki,
Tomoki Anzai,
Xiangyu Chen,
Shintaro Noda,
Fan Shi,
Kei Okada,
Masayuki Inaba,
IJRR 2018
Paper
Hardware and controller of two-dimensional transformable aerial robot HYDRUS and its application on whole-body grasping.
|
|
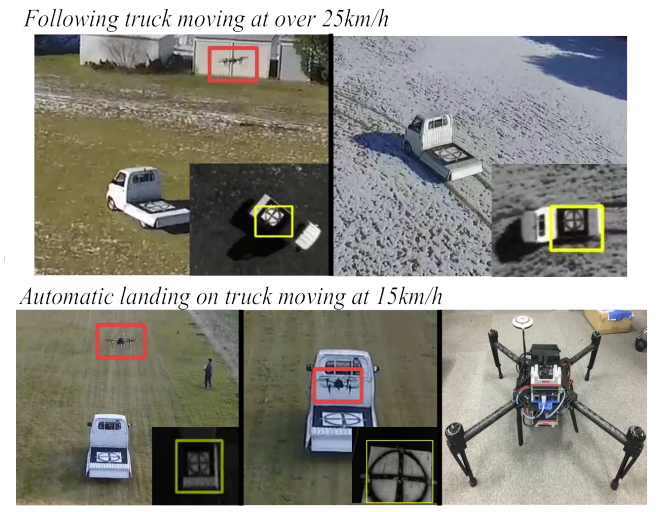
Robust real-time visual tracking using dual-frame deep comparison network integrated with correlation filters
Krishneel Chaudhary,
Moju Zhao,
Fan Shi,
Xiangyu Chen,
Kei Okada,
Masayuki Inaba,
IROS 2017
Paper
Approach in MBZIRC 2017 in detecting and tracking a moving target.
|
|
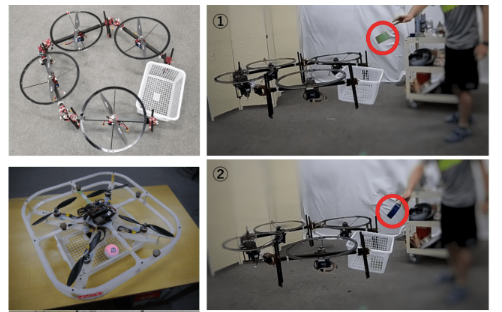
Multilinked multirotor with internal communication system for multiple objects transportation based on form optimization method
Tomoki Anzai,
Moju Zhao,
Xiangyu Chen,
Fan Shi,
Kei Okada,
Masayuki Inaba,
IROS 2017
Paper
Object transportation with 6-links aerial transformable robot.
|
|
Reviwer of ICRA, IROS, RAL, RSS.
|
Japanese MEXT Scholarship from 2016 to 2021.
IEEE RAS-JJC Young Award in ICRA 2020.
Switzerland NCCR Grant for Ph.D Exchange Programme on 2020.
3rd prize in MBZIRC 2020 Challenge 1.
ICRA 2018 Best Paper Award on UAV.
Freshman, Guanghua, May-Fourth Scholarship from Peking University in 2011, 2014, 2015.
First prize in Undergraduate Research Program in EECS Department, Peking University in 2015.
|
|